轻型产业学院高筱婷讲师在自动化与控制系统领域TOP期刊《IEEE Transactions on Automation Science and Engineering》上发表了题为“Adaptive displacement constraint control with predefined performance for active magnetic bearings”的SCI论文。论文第一作者为轻型产业学院高筱婷讲师,第一单位为辽宁大学,合作单位为东北大学。
论文简介:
主动磁悬浮轴承因其无接触、高转速及具有可控动态性能等优点,在电力驱动、储能飞轮和涡轮机械等各类工业领域中得到越来越广泛的应用,逐渐成为智能高速旋转机械中不可或缺的组成部分。在现有的大多数主动磁悬浮轴承位移控制方案中,通常没有考虑位移的约束和限制。然而,考虑到主动磁悬浮轴承的高速旋转和主动可控特性,有必要预设转子位移的性能指标,包括收敛速度、超调量和约束限制,这不仅可以避免严重的安全事故,还能充分发挥主动磁悬浮轴承在不同实际情况下的主动控制优势。
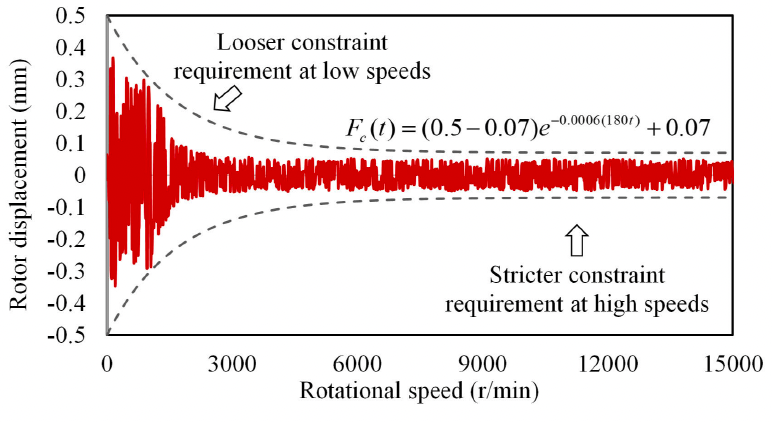
因此,本项工作提出了一种自适应漏斗控制策略,应用于主动磁悬浮轴承的位移约束控制,并具有预设的跟踪性能。为了更好地描述实际主动磁悬浮轴承的动力学特征,考虑其不确定性和非平稳性等固有特性,构建了带有切换参数的非线性主动磁悬浮轴承模型替代现有的固定参数模型。然后,基于Lyapunov稳定性理论和反步法,设计了漏斗控制方案和自适应律,限制转子位移不超过预设的漏斗边界。
通过数学分析,验证了所提出的控制器稳定性和收敛性,仿真和实验结果验证了其有效性。同时,实验结果表明所提出的控制器具有在实践中应用的潜力和可能性。
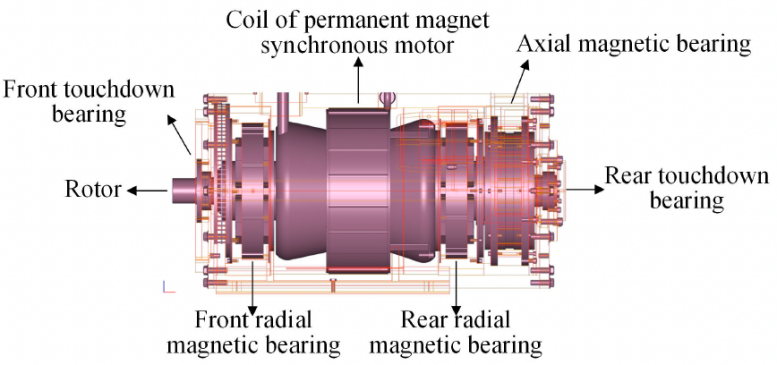
A. 主动磁悬浮轴承模型
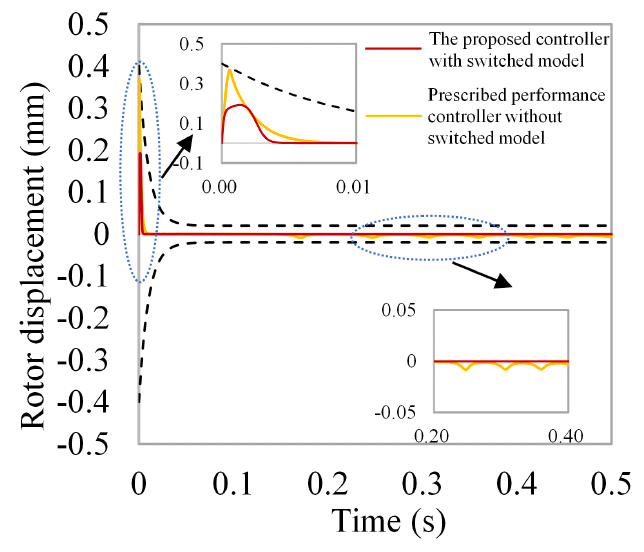
B. 仿真分析
C. 实验结果

D. 实验平台
全文链接:https://ieeexplore.ieee.org/document/10413315
作者简介:
高筱婷,博士,轻型产业学院讲师,主要从事智能电气设备、新型储能系统的状态监测与运行控制的理论及应用研究。主持国家自然科学基金项目1项、教育部重点实验室开放课题1项、国网公司科技项目2项,研究成果获IEEE Transactions on Consumer Electronics年度最佳论文奖第一名、IEEE Industry Applications Society 电力系统保护委员会论文奖、中国自动化学会科技进步奖一等奖、中国专利优秀奖、辽宁省自然科学学术成果奖二等奖等奖励。发表高水平论文20余篇,申请及授权发明专利5项。

